









多模态触觉感知解决方案
提供定制化传感器设计方案,
赋予机器人感知压力、温度、湿度等物理特性的能力
 方案咨询
方案咨询
方案介绍
织物压力传感器具备高柔韧性和良好的耐用性,可测量法向力与剪切力,可无缝贴合曲面,还能够整合温度、湿度传感器,赋予机器人感知压力、温度、湿度等物理特性的能力,助力实现更精细化的控制和更智能化的决策。
方案优势

厚度
最薄0.5mm

精度
毫牛级压力感知

响应速度
毫秒级

阵列密度
可达100个传感点/cm²

多模态感知
可测量法向力与剪切力,并整合温度、湿度传感器
应用场景

灵巧手
识别抓握力度
手臂与躯干
接触压力分级
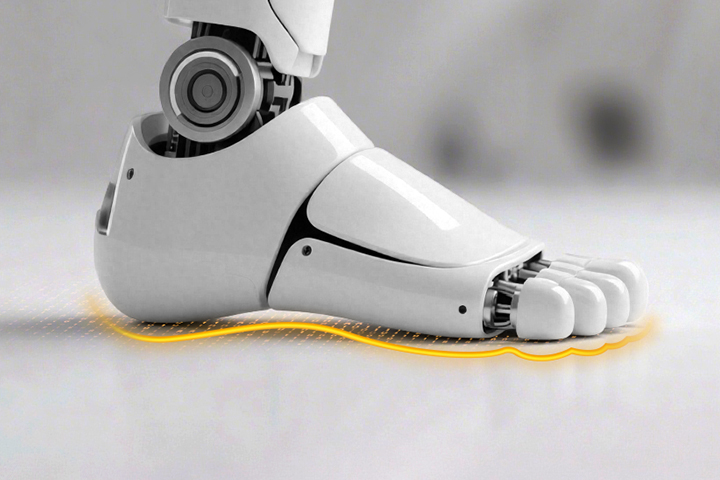
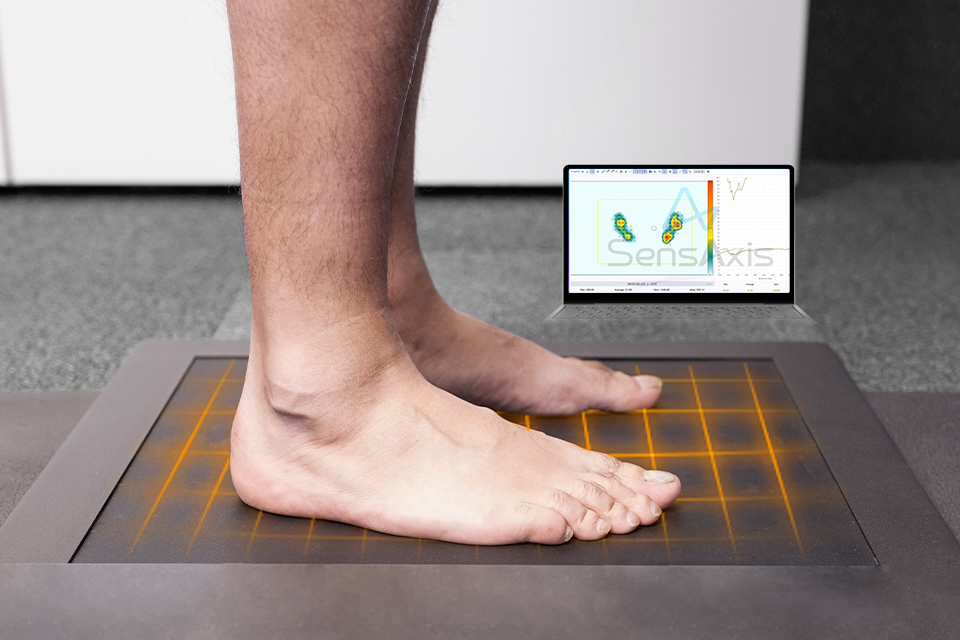
人形机器人足底
分析行走步态
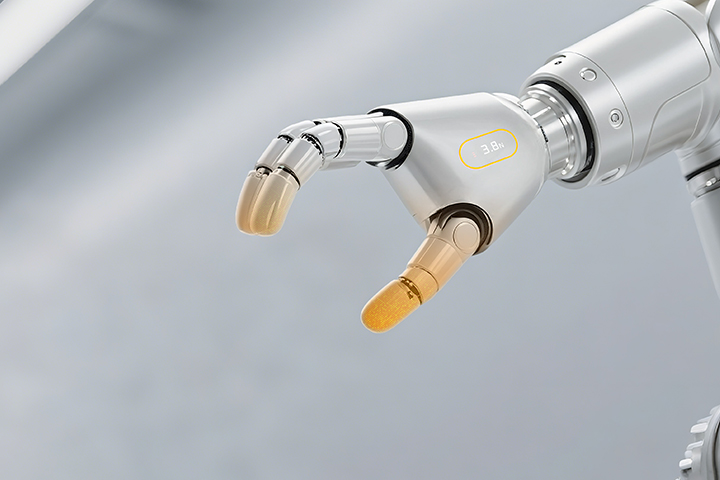
夹爪末端
反馈抓取力度

机械臂
实时碰撞检测

医疗康复外骨骼
识别动作意图
定制专属解决方案
我们会指派专业的顾问为您答疑解惑








